

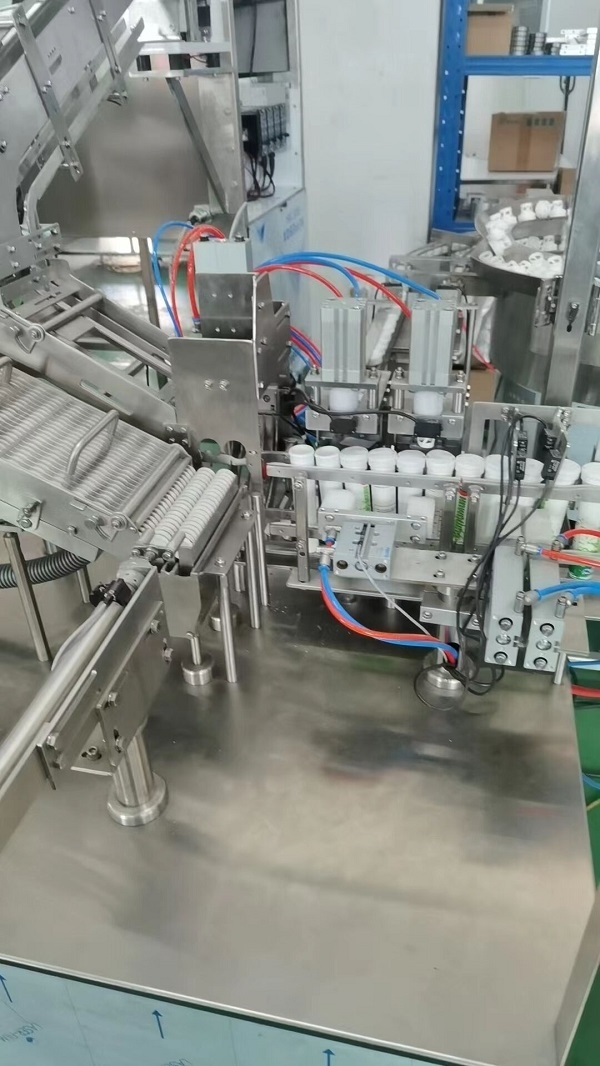
Peiriant Cyfrif Tabledi Efervescent
Nodweddion
1. System dirgrynu cap
Llwytho'r cap i'r hopran â llaw, gan drefnu'r cap i rac yn awtomatig i'w blygio trwy ddirgrynu.
2. System fwydo tabledi
3. Rhowch y dabled i mewn i hopran tabled â llaw, bydd y dabled yn cael ei hanfon i'r safle tabled yn awtomatig.
4. Llenwi uned tiwbiau
Ar ôl canfod bod tiwbiau, bydd y silindr bwydo tabledi yn gwthio'r tabledi i'r tiwb.
5. Uned bwydo tiwb
Rhowch y tiwbiau yn y hopran â llaw, bydd y tiwb yn cael ei leinio i safle llenwi tabledi trwy ddadgymalu'r tiwb a bwydo'r tiwb.
6. Uned gwthio cap
Pan fydd tiwbiau'n cael tabled, bydd system gwthio cap yn gwthio'r cap ac yn cau hynny'n awtomatig.
7. Uned gwrthod tabled
Unwaith y bydd 1 darn neu fwy o dabledi yn y tiwb ar goll, bydd y tiwb yn cael ei wrthod yn awtomatig. Os nad oes tabledi na thiwbiau, ni fydd y peiriant yn cau.
8. Adran Rheoli Electronig
Mae'r peiriant hwn yn cael ei reoli gan PLC, silindr a modur stepper, mae'ngyda system larwm aml-swyddogaeth awtomatig.
Paramedrau
| Model | TWL-80A |
| Capasiti | 80 tiwb/munud |
| Foltedd | wedi'i addasu |
| Pŵer | 2KW |
| Aer cywasgedig | 0.6MPa |
| Dimensiwn y peiriant | 3200 * 2000 * 1800mm |
| Pwysau'r peiriant | 1000kg |


Fideo
Categorïau cynhyrchion


Ein Cylchlythyr Wythnosol
Mae'n ffaith sefydledig ers tro y bydd gorchmynnydd yn fodlon ar
darllenadwyedd tudalen wrth edrych.
-

E-bost
-

Ffôn
-

Whatsapp
-

Top


